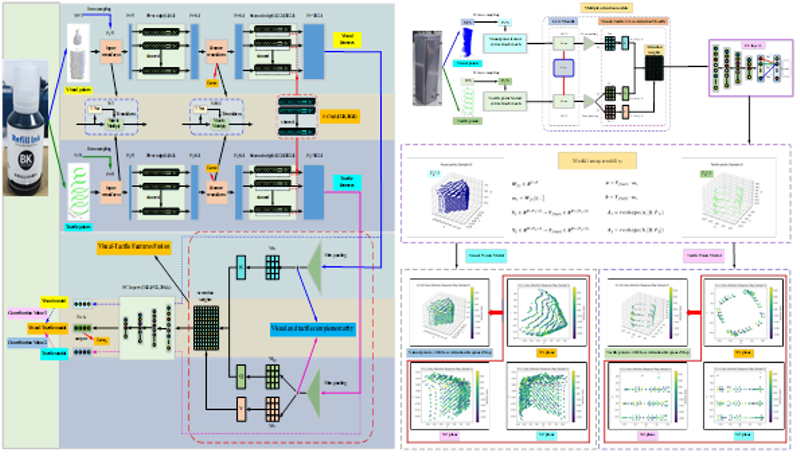
我院李玉良课题在视触觉感知和决策方面取得了多项成果。项目组基于多模态仿生手指传感器,搭建了获取目标物体不同特征信息的触觉材质、触觉纹理及视触觉几何形状感知实验平台;在对所采集到的多模态信息进行处理及融合的基础上,分别构建了基于多通道信息融合的目标物体材质识别及可解释性模型、基于Multi-CBAM-CNN模型的目标物体纹理识别及可解性模型和基于视、触觉点云融合的三维形状识别及可解释性模型,可准确识别物体的材质、纹理和形状。课题组发表了一系列SCI论文,如①A data-driven robotic tactile material recognition system based on electrode array bionic finger sensors(Sensors and Actuators A: Physical, 2023,中科院3区);②Tactile texture recognition of multi-modal bionic finger based on multi-modal CBAM-CNN interpretable method(Displays, 2024,中科院二区);③3D shape recognition based on real visual and tactile point cloud information fusion. ( Expert Systems With Applications,2026,中科院一区(Top)).